Sensors of technological parameters — force, pressure, torque
For the implementation of automated and highly accurate control of technological processes, it is always necessary to have at your disposal information about the current values of the key technological parameters. Usually, various sensors are used for this purpose: forces, pressure, torque, etc. Let's look at three types of sensors, let's understand the principle of their operation.

First of all, we note that in the construction of force or torque sensors, sensitive elements are used, certain properties of which change in accordance with the current degree of deformation resulting from one or another external influence.
These can be elastic metal plates, springs or shafts, whose deformation is transmitted to a magnetostrictive, piezoelectric or semiconductor element, whose electrical or magnetic parameters will directly depend on the degree of deformation. It will be enough to measure this parameter to get an idea of the size of the deformation and, accordingly, of the force (pressure, torque).
Tensometric strain gauges

The simplest strain gauge based on strain gauge wire converter includes a mechanical elastic element that is subjected to deformation and a strain gauge attached to it, the deformation of which is converted directly into an electrical signal.
A thin (with a diameter of 15 to 60 microns) nichrome, constantan or ellinvar wire, which is folded with a snake and fixed on a film backing, acts as a strain gauge sensor. Such a transducer is glued to the surface whose deformation is to be measured.
The deformation of the mechanical elastic element leads to the stretching or compression of the wire along its length, while its cross-section decreases or increases, which affects the change in the resistance of the converter to electric current.
By measuring this resistance (voltage drop across it), we get an idea of the magnitude of the mechanical deformation and, accordingly, the force, provided that the mechanical parameters of the deformed element are known.
Pressure gauge torque sensors

To measure the force moment, sensitive elastic elements in the form of springs or thin shafts are used, which are twisted during the technological process. The elastic angular deformation, that is, the relative angle of the beginning and end of the spring, is measured and converted into an electrical signal.
The elastic element is usually enclosed in a tube, one end of which is fixed stationary, and the other is connected to an angular displacement sensor that measures the angle of divergence between the ends of the tube and the deformable element.
Thus, a signal is obtained that carries information about the magnitude of the torque.To remove the signal from the spring, the wires of the strain-resistor element are connected by slip rings to the brushes.
Magnetostrictive force sensors
There are also force sensors with strain gauge magnetostrictive transducers. Used here the inverse magnetostriction phenomenon (Villari effect), which consists in the fact that when pressure is applied to a core made of an iron-nickel alloy (such as permaloid), its magnetic permeability changes.
Longitudinal compression of the core leads to expansion its hysteresis loops, the steepness of the loop decreases, which leads to a decrease in the value of the magnetic permeability, respectively — to a decrease in the inductance or mutual inductance of the sensor windings.
Since the magnetic characteristics are non-linear and also due to the fact that they are significantly affected by temperature, it becomes necessary to use a compensation circuit.
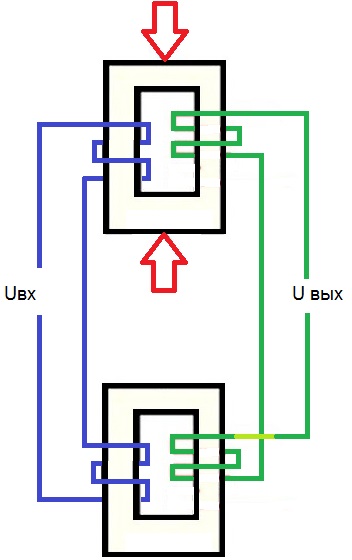
The following general scheme applies for compensation. A closed magnetostrictive magnetic core made of nickel-zinc ferrite is subjected to a measurable force. Such a core does not experience force pressure, but the windings of the two wires are connected to each other, so a change in the total EMF occurs.
The primary windings are identical and connected in series, they are powered by alternating current with a frequency within ten kilohertz, while the secondary windings (also the same) are turned on oppositely, and in the absence of a deforming force, the total EMF is 0. If the pressure on the first core increased, the total EMF at the output is non-zero and proportional to the deformation.