Mechanical characteristics of electric motors and production mechanisms
 When designing an electric drive, the electric motor must be selected so that its mechanical characteristics match the mechanical characteristics of the production mechanism. The mechanical characteristics give the relationship of the variables in the steady state.
When designing an electric drive, the electric motor must be selected so that its mechanical characteristics match the mechanical characteristics of the production mechanism. The mechanical characteristics give the relationship of the variables in the steady state.
A mechanical characteristic of the mechanism is called the relationship between the angular velocity and the moment of resistance of the mechanism, reduced to the motor shaft) ω = f (Mc).
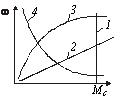
Rice. 1. Mechanical characteristics of mechanisms
Among all the variety, there are several characteristic types of mechanical characteristics of the mechanisms:
1. Characteristic with a moment of resistance independent of speed (straight line 1 in Fig. 1). The velocity-independent mechanical characteristic is drawn as a straight line parallel to the axis of rotation, in this case vertical. Such a characteristic is possessed, for example, by cranes, winches, piston pumps with a constant delivery height, etc.
2.A characteristic with a moment of resistance linearly dependent on speed (row 2 in Fig. 1). This dependence is inherent, for example, in the drive of an independently excited DC generator operating at a constant load.
3. Characteristic with a non-linear increase in torque (curve 3 in Fig. 1). Typical examples are the operation of fans, centrifugal pumps, propellers. For these mechanisms, the moment Mc depends on the square of the angular velocity ω... This is the so-called parabolic (fan) mechanical characteristic.
4. Characteristic with non-linearly decreasing moment of resistance (curve 4 in Fig. 1). Here, the drag moment is inversely proportional to the rotational speed. In this case, the power remains constant throughout the entire operating speed range of the mechanism. For example, in the mechanisms of the main movement of some metal-cutting machines (turning, milling, drilling), the moment Mc changes inversely proportional to ω, and the power consumed by the mechanism remains constant.
Mechanical characteristics of the electric motor is called the dependence of its angular speed on the torque ωd = f (M). Here it should be borne in mind that the moment M on the motor shaft, regardless of the direction of rotation, has a positive sign — the moment of movement. At the same time, the moment of resistance Mc has a negative sign.
As examples, Figs. 2 shows the mechanical characteristics: 1 — synchronous motor; 2 — DC motor with independent excitation; 3 — DC motor with series excitation.
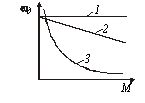 Rice. 2. Mechanical characteristics of electric motors
Rice. 2. Mechanical characteristics of electric motors
To evaluate the properties of the mechanical characteristics of an electric drive, the concept of characteristic stiffness is used.The stiffness of the mechanical characteristic is determined by the expression
β = dM / dω
where dM — change in engine torque; dωd — the corresponding change in angular velocity.
For linear characteristics the value β remains constant, for non-linear it depends on the operating point.
Using this concept, the features shown in Fig. 2, can be qualitatively evaluated as follows: 1 — absolutely rigid (β = ∞); 2 — solid; 3 — soft.
An absolutely difficult characteristic — the motor rotation speed remains unchanged when the motor load changes from zero to nominal. Synchronous motors have this characteristic.
Rigid characteristic — the rotational speed changes little when the load changes from zero to nominal. This characteristic is possessed by a parallel-excited DC motor as well as by an induction motor in the region of the linear part of the characteristic.
A rigid characteristic is considered to be one in which the speed change does not exceed approximately 10% of the rated speed when the load is changed from zero to rated.
Soft characteristic — motor speed changes significantly with relatively small changes in load. This characteristic is possessed by a direct current motor with series, mixed or parallel excitation, but with additional resistance in the armature circuit, as well as asynchronous with resistance in the rotor circuit.
For most production mechanisms, asynchronous squirrel-cage motors are used, which have rigid mechanical characteristics.
All mechanical characteristics of electric motors are divided into natural and artificial.
Natural mechanical characteristics refers to the operating conditions of the engine with the nominal values of the parameters.
For example, for a parallel-excited motor, the natural characteristic can be plotted for the case where the armature voltage and excitation current have nominal values and there is no additional resistance in the armature circuit.
The natural characteristic of an induction motor corresponds to the rated voltage and rated frequency of the alternating current supplied to the motor stator, provided that there is no additional resistance in the rotor circuit.
Thus, for each engine, only one natural characteristic can be built and an unlimited number of artificial ones. For example, each new value of armature resistance of a DC motor or in the rotor circuit of an induction motor has its own mechanical characteristics.
